概要
その昔(1991~1993年頃)、ケンブリッジ大学のコーヒーポットをWebカメラでモニタすることで、遠隔からガラス製ポットの残量を目視できるシステムが話題になったことがあります。(世界初のライブカメラ)
さて、私の所属する朝日ネットは、歌舞伎座タワー21Fという眺めの良い場所にあります。ただ、1フロアがそこそこ広く、コーヒーポットのある休憩ルームは少し遠い廊下を隔てた別室にあります。
そこで気付いたのは、休憩ルームまで足を運んで、コーヒーポット(ステンレス製)を持ち上げた直後に「コーヒーポットが空だった…」と居室に戻っていく人が意外と多いこと。
そこで、
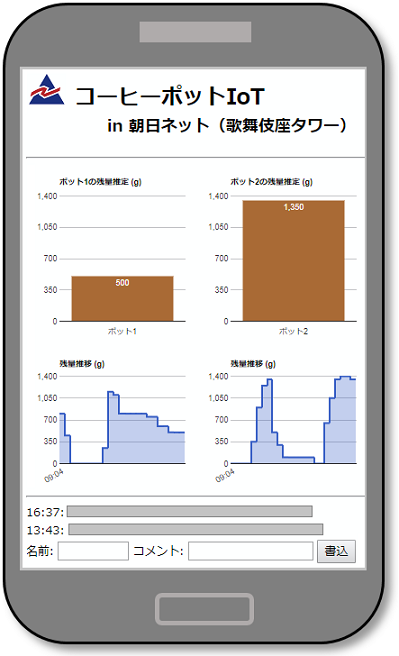
(右上の図は、実際に稼働しているコーヒーポットIoTのWeb画面で、居室や休憩ルームから参照することができます)
さて、私の所属する朝日ネットは、歌舞伎座タワー21Fという眺めの良い場所にあります。ただ、1フロアがそこそこ広く、コーヒーポットのある休憩ルームは少し遠い廊下を隔てた別室にあります。
そこで気付いたのは、休憩ルームまで足を運んで、コーヒーポット(ステンレス製)を持ち上げた直後に「コーヒーポットが空だった…」と居室に戻っていく人が意外と多いこと。
そこで、
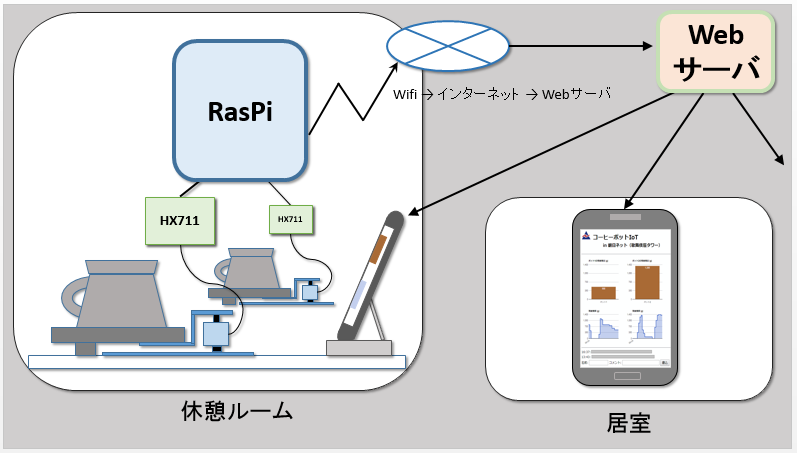
1.居室から、ポット2台の残量をリアルタイムで確認できる
2.休憩ルームで、ポット2台を持ち上げなくとも残量が見える
という仕組みがあると良いなと思い、懐かしのコーヒーポット・ライブカメラの現代版ということで、ラズパイ+重量センサで、コーヒーポットIoT と名付けた仕組みを作ってみました。2.休憩ルームで、ポット2台を持ち上げなくとも残量が見える
(右上の図は、実際に稼働しているコーヒーポットIoTのWeb画面で、居室や休憩ルームから参照することができます)
 そこで、
そこで、